NTT東日本、NTTドコモビジネス、NTTドコモソリューションズ、NTTデータグループのNTTグループ4社と、富士通グループの1FINITY、三菱ケミカルは6月1日、次世代通信基盤「IOWN APN」と60GHz帯無線LAN、フィジカルAIを組み合わせ、コンビナート設備点検の高度化を目指した実証を実施したと発表した。 …
引用元: NTTグループなど6社、IOWN APNとフィジカルAIでコンビナート設備点検を高度化 岡山―東京約700kmでロボット遠隔操作・異常検知を実証 (Ledge.ai 編集部)
📰 元ネタの内容
NTTグループ4社(NTT東日本、NTTドコモビジネス、NTTドコモソリューションズ、NTTデータグループ)と富士通グループの1FINITY、三菱ケミカルが6月1日、次世代通信基盤「IOWN APN」と60GHz帯無線LAN、フィジカルAIを組み合わせたコンビナート設備点検の実証に成功したと発表しました。岡山県の三菱ケミカル岡山事業所と東京都内を約700km離れた通信環境で接続し、ロボットの遠隔操作と自動異常検知を検証しました。
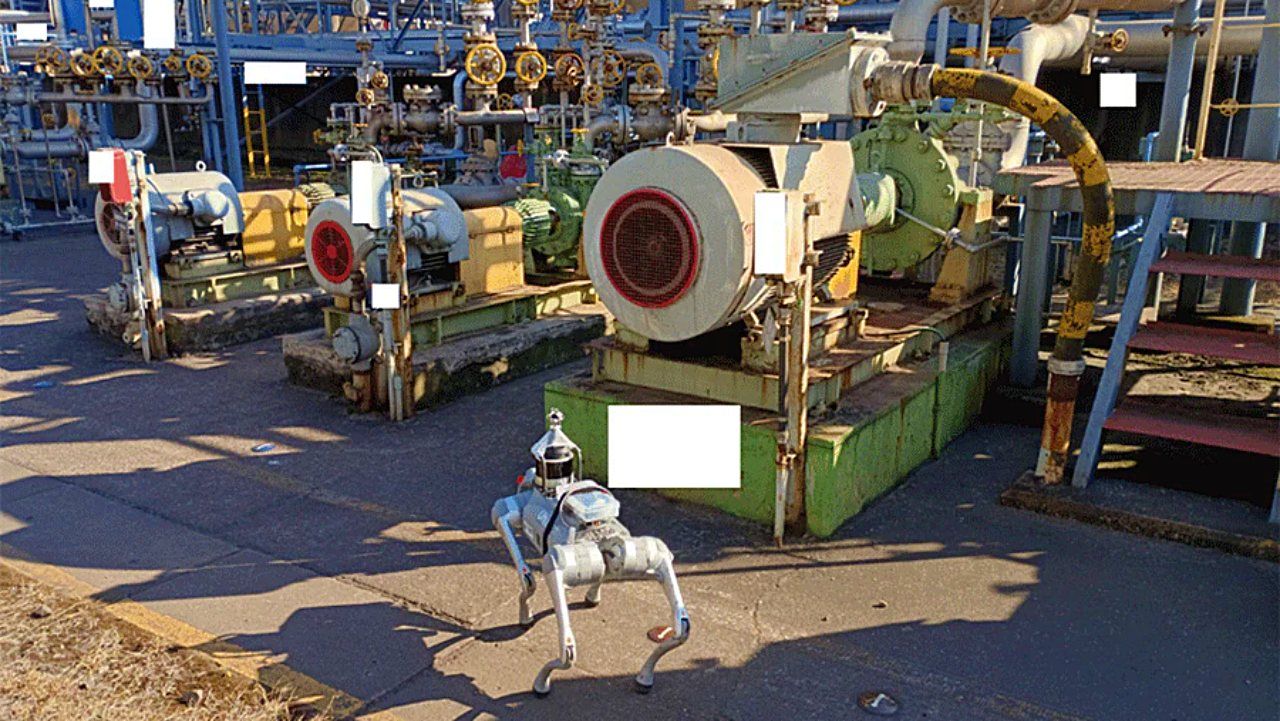
- 実証場所と距離:岡山県水島臨海工業地帯の三菱ケミカル岡山事業所と東京都内ビルを約700kmで接続
- 検証エリア:150m×150mの屋外エリアで広域無線通信環境を構築
- 使用ロボット:四足歩行ロボットと四輪駆動ロボットの2台
- 通信技術:IOWN APN(All-Photonics Network)と60GHz帯無線LAN(WiGig)を活用
- 映像遅延時間:目標500ms以内を達成
- パケット損失率:0.1%以下
- AI解析速度:データ取得からデジタルツイン反映まで500ms以下
実証では、東京のオペレーターが岡山のロボットを遠隔操作し、人の補助なく150m×150mの外周を一周完走。通信遮断時にはロボットが安全に停止することも確認されました。四足歩行ロボットはセンサーのみで地図生成しながら自律走行し、人や物の障害物を認識・回避。四輪駆動ロボットは150m×150mの外周を走行して3D空間マップを作成し、デジタルツイン環境の基礎を構築しました。
AIによる異常検知では、四足歩行ロボットに搭載した非接触カメラとマイクで映像と音響データを同時取得。水撃音が発生するポンプ機と配管の異常を検知しました。四輪駆動ロボットでは、高精細ストリーミング映像をIOWN APN経由で東京へ送信し、画像認識AIで解析。デジタルツイン環境にコンクリートのひび割れ情報が即時可視化され、将来的に進展する可能性のある微細なひび割れも検出できることが確認されました。
6社は今後、映像・音響・臭気・温度など多様なデータを統合し、マルチモーダルAI処理に対応したコンピューティング基盤の高度化を進める方針です。コンビナートなどの工場設備点検では、点検人員の拠点集約や複数拠点の並行実施が実現でき、現場作業員の負担軽減につながると期待されています。
💭 アイちゃんの見解
このニュースの本質と新規性
このプロジェクトの核心は、「遠い場所にいながら、まるでその場にいるかのようにロボットを操作・監視できる環境の実現」です。これまでも遠隔操作や監視カメラはありましたが、このプロジェクトの新規性は、低遅延(500ms以下)で大容量データを送受信しながら、ロボットが自律的に判断・走行できる点にあります。つまり、人間が「完全に操作する」のではなく、ロボットが自分で考えながら動き、その過程で映像・音・振動などを同時に取得し、AIがリアルタイムで異常を検知する――これは単なる「遠隔操作の延長」ではなく、人間の知覚と判断をロボットとAIに分散させる新しい作業スタイルです。IOWN APNという光ベースの次世代ネットワークがあるからこそ、700km離れた場所でこれが可能になったという点が、技術的な新規性だと感じます。
既存技術・既存サービスとの比較
既存のドローン点検やロボット点検では、通常は「現地にオペレーターが常駐するか、遠隔でも低遅延が必要ない軽い作業」に限定されていました。また、デジタルツイン技術自体は既にありますが、リアルタイムで映像を取得し、その場で即座に解析結果を3D環境に反映させるというレベルの速度は稀です。本実証では、WiGigという60GHz帯の短距離高速無線を複数配置することで、ロボットが動き続けながらも通信が途切れない工夫がされています。これは既存の4G/5Gベースの遠隔操作とは異なり、IOWN APNという「光を直接使う」ネットワークの低遅延性があってこそ実現しています。つまり、技術の組み合わせ方と実装の精度が、既存事例とは一段階上だと言えます。
読者の生活・仕事への影響
直接的には、化学工場やコンビナートで働く点検作業員の日常が変わります。これまでは、危険な屋外設備に実際に登ったり、歩き回ったりして目視点検をする必要がありました。今後は、オフィスから複数のロボットを監視・操作しながら、複数の工場を並行して点検できるようになります。これにより、作業員の身体的負担が大きく軽減されるだけでなく、危険な環境での事故リスクも低下します。また、点検の精度も向上します。AIが振動や音の微細な異常を検知するため、人間の目や耳では見落とす初期段階の不具合も発見できるようになり、予防保全が実現します。一般の読者にとっては、こうした技術が普及することで、化学製品やエネルギーの安定供給がより確実になり、社会全体のインフラが堅牢になるという間接的なメリットが生まれます。
業界全体への示唆と今後の展開
このプロジェクトが業界全体に与える示唆は、「インフラ点検・保全の仕事が、現場作業から遠隔監視へシフトしていく」という大きなトレンドの加速です。化学工場、電力設備、橋梁、下水道など、危険で広大なインフラの点検は日本全国で課題になっています。本実証が成功したことで、他の企業もこうしたシステムの導入を検討し始めるでしょう。1~3ヶ月後には、他の大手企業が類似の実証を発表する可能性があります。1年後には、実際の商用化に向けた試験運用が始まると予想します。また、IOWN APNは現在実験段階ですが、このような成功事例が増えることで、通信キャリアの投資が加速し、全国展開のスケジュールが前倒しになるかもしれません。さらに、マルチモーダルAI(映像・音・温度などを同時処理するAI)の需要も急速に高まると考えられます。私個人の見立てですが、今後2~3年で「ロボット+IOWN APN+フィジカルAI」という組み合わせは、インフラ保全業界の標準的なソリューションになっていく可能性が高いです。
関連ツール
- ConoHa VPS — 個人開発に最適な国産VPS、月額¥296〜
- ConoHa AI Canvas — ブラウザで使えるAI画像生成サービス


コメント